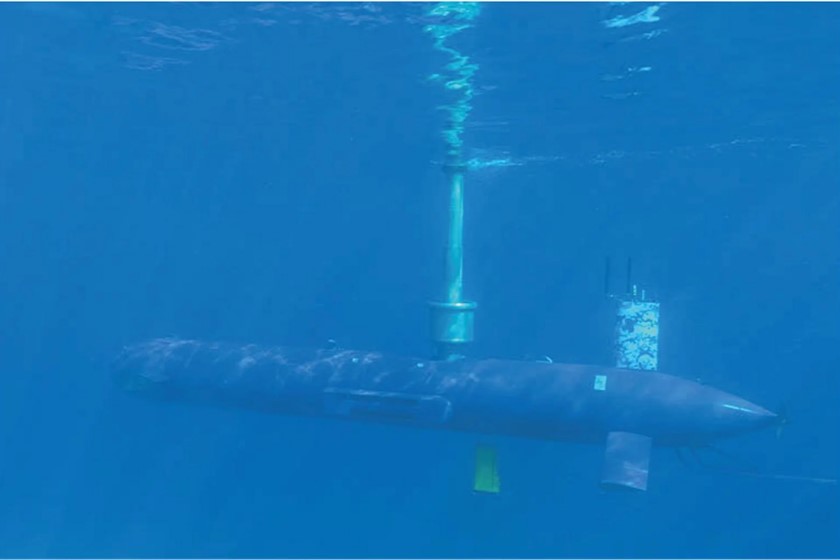
Na wodach w pobliżu bazy morskiej Deutsche Marine w Eckernförde trwają próby izraelskiego bezzałogowego, autonomicznego pojazdu podwodnego IAI Elta ELI-3325 BlueWhale.
Testy te Deutsche Marine realizuje wspólnie z Federalnym Biurem ds. Wyposażenia, Technologii Informacyjnych i Wsparcia Federalnych Sił Zbrojnych (BAAINBw, Bundesamt für Ausrüstung, Informationstechnik und Nutzung der Bundeswehr) i według aktualnego harmonogramu zakończyć się mają pod koniec listopada.
Pozyskanie konstrukcji takiej jak m.in. ELI-3325 zdecydowanie poprawi zdolności Deutsche Marine do zabezpieczenia własnej infrastruktury krytycznej, a także patrolowania wód terytorialnych pod kątem wykrywania i monitoringu podejrzanych jednostek pływających tak nawodnych, jak i podwodnych. Niemcy poważne zainteresowanie Blue Whalem wyraziły już 10 maja 2023 roku w trakcie konferencji i salonu Undersea Defence Technology (UDT) w Rostoku. Wówczas bowiem należąca do holdingu thyssenkrupp Marine Systems (tkMS) firma Atlas Elektronik oficjalnie zainicjowała współpracę z izraelską spółką IAI Elta, której celem było doposażenie Blue Whale’a w zaawansowany holowany, pasywny system hydrolokacyjny produkcji Atlas Elektronik. System ten konstrukcyjnie bazuje na sprawdzonym już systemie ACTAS (Active Towed Array Sonar) skąd pozyskano kanał pasywny. Pracuje on w zakresie częstotliwości od 50 do 10 000 Hz.
Warto w tym miejscu wspomnieć, że izraelski bezzałogowiec, który nie jest systemem prototypowym, ale dopracowaną konstrukcją. Izrael testował go w głębokiej tajemnicy przez wiele miesięcy (sam producent podkreśla bowiem, że w dniu ujawnienia miał on za sobą już tysiące godzin operacji i testów), został oficjalnie ujawniony dopiero 5 maja 2023 roku. Powstał on najprawdopodobniej jako modyfikacja zaprezentowanego w 2017 roku, i zaprojektowanego specjalnie na zamówienie Sił Obronnych Izraela, bezzałogowego pojazdu Caesaron. Legitymuje się on masą 5,5 tony przy wymiarach 10,9x1,12 m. W położeniu podwodnym może on przemieszczać się z prędkością do 7 węzłów. Optymalna prędkość patrolowa, przy której długotrwałość rejsu wynosić może nawet 30 dni, ograniczona jest natomiast do 2-3 węzłów. Maksymalna, oficjalnie ujawniona, głębokość operacyjna wynosi 300 m. Kształt pojazdu oraz rozmieszczenie sterów głębokości zostało tak dobrane by AUV mógł kłaść się na dnie. Jego wielkość z kolei dobrana została do transportu wewnątrz 40-stopowego kontenera.
Jak przystało na nowoczesną platformę jest on konstrukcją modułową i może zostać doposażony w specjalistyczne wyposażenie w zależności od potrzeb. Jego zakres działalności dotyczyć może m.in. zadań klasyfikowanych jako ISR (Intelligence Surveillance & Reconnaissance), do przeprowadzenia zwiadu w rejonie, gdzie planowany jest desant operatorów wojsk specjalnych, zabezpieczenia działań własnych okrętów podwodnych, poruszając się z odpowiednim wyprzedzeniem lub, co obecnie jest szczególnie pożądane, umożliwi dozór podwodnej (i nawodnej) infrastruktury krytycznej. Wyposażony jest w system radiolokacyjny o małym prawdopodobieństwie wykrycia (LPI) oraz system optoelektroniczny (niezbędny dla zadań typu IMINT). Może być także dodatkowo wyposażony w systemy walki elektronicznej (ELINT i COMINT). Wszystkie anteny tego typu instalowane są na podnoszonym teleskopowo maszcie. Oczywiście ELI-3325 wyposażony jest także w systemy hydrolokacyjne tj. dwa sonary obserwacji bocznej (z antenami o syntetycznej aperturze), które umożliwiają mapowanie dna oraz wykrywanie i precyzyjne lokalizowanie obiektów niebezpiecznych, w tym min dennych, a także sonar dziobowy oraz sonar przeznaczony do wykrywania i omijania przeszkód (patrzący pod kątem ok 45° w dół).
Wszystkie dane pozyskane przez operujący w rejonie pojazd przesyłane są do centrum dowodzenia przez szyfrowane, szerokopasmowe połączenie satelitarne w czasie rzeczywistym.
Co ciekawe, tym samym pojazdem, znanym pod nazwą IIBW LDAUV (Italian-Israeli BlueWhale), już w pierwszej połowie roku zainteresowali się także Włosi.
Podobne z tej kategorii:

Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu