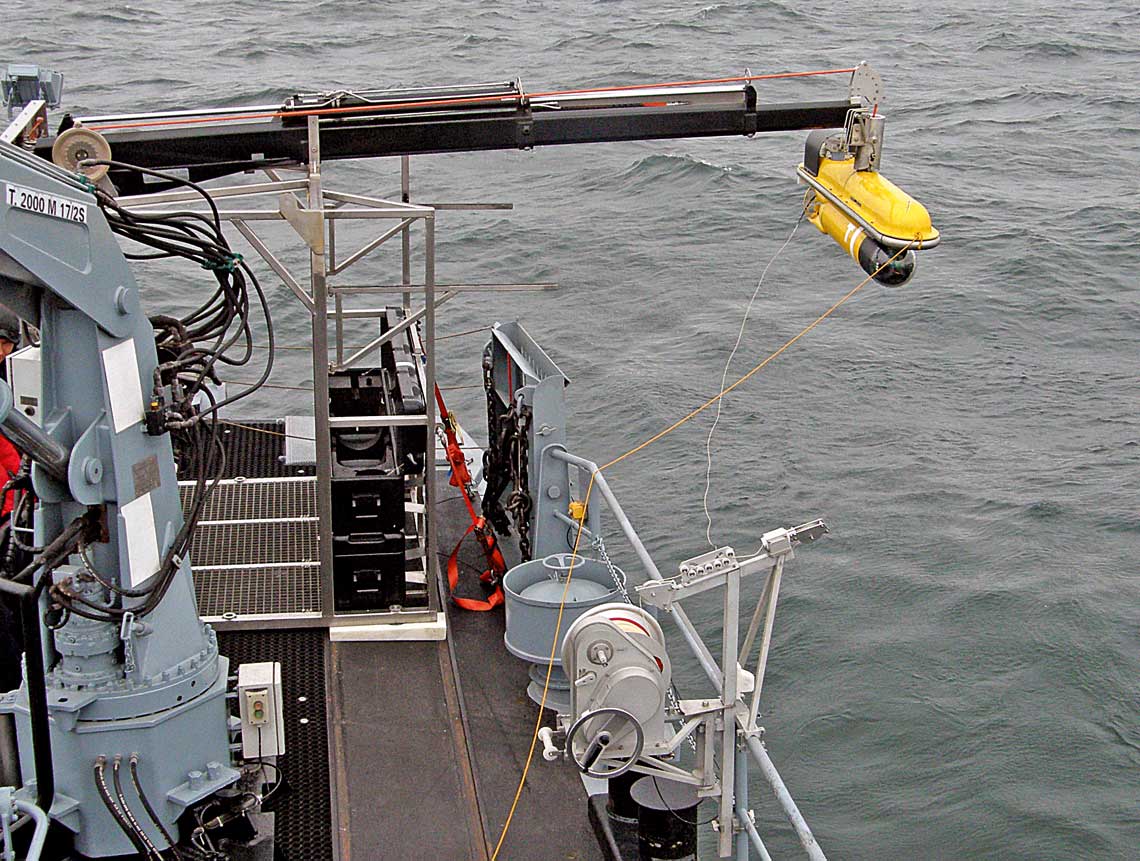
Wodowanie Gluptaka z uzyciem modulu pokladowego na okrecie proj. 206FM.
Pierwsze podejście do wdrożenia do eksploatacji zdalnie sterowanych przeciwminowych pojazdów podwodnych w Marynarce Wojennej nastąpiło już w drugiej połowie lat 80. Wówczas, w ramach programu rozwoju niszczyciela min proj. 255 Lodówka, planowano zakupić pojazdy identyfikacji i niszczenia min proj. 190 (MIVG, Minenidentifizierungs- und Vernichtungsgerät), opracowane w Niemieckiej Republice Demokratycznej, w Instytucie Techniki Morskiej w Warnemünde koło Rostocku. Kryzys ekonomiczny w kraju, jak też zmiany polityczne w Europie, które zaowocowały m.in. zjednoczeniem obu państw niemieckich, zamknęły ten etap historii. W tym czasie m.in. we Francji i w Republice Federalnej Niemiec zdobyto już znaczne doświadczenia z podobnymi pojazdami, co pozwoliło zdefiniować ich główne wady i określić kierunki dalszego rozwoju systemów tej klasy.
Jednym z ich ważniejszych niedostatków był sam sposób działania. Pojazdy takie jak francuski Societe ECA (dziś ECA Robotics) PAP 104 czy niemiecki MBB (potem EADS, dziś Atlas Elektronik) Pinguin B3 miały za zadanie transport i zrzut sporego (130 kg) ładunku niszczącego w pobliżu obiektu niebezpiecznego, mając przy tym ograniczoną manewrowość oraz sporą masę, co z kolei nie gwarantowało oczekiwanej precyzji i stwarzało ryzyko niezamierzonego wzbudzenia niekontaktowego zapalnika zwalczanej miny. W tym wypadku, choć główny cel – ochronę życia załogi okrętu – osiągnięto, potencjalne straty materialne i ograniczona liczba pojazdów na pokładzie niszczyciela min, czyniły tę metodę nieekonomiczną. Do sytuacji takich mogło dojść w trudnych warunkach hydrologicznych, ukształtowania dna, czy w przypadku zastosowania bardzo czułego zapalnika miny.
Z tych powodów już na początku lat 90. firmy zachodnie rozpoczęły prace nad nową metodą niszczenia podwodnych obiektów niebezpiecznych w trudnych warunkach – z zastosowaniem samobieżnego ładunku bojowego, działającego kierunkowo i detonowanego zdalnie. Idea ta umożliwiła ograniczenie wielkości ładunku bojowego oraz przenoszącego go pojazdu, który w założeniu miał być jednorazowego użytku i ulegać zniszczeniu wraz z atakowanym obiektem. W tym przypadku, nawet nieumyślne wzbudzenie zapalnika miny nie było problemem, a wręcz stanowiło zwieńczenie misji sukcesem, ponieważ taki pojazd z definicji był przeznaczony na straty. Pozwoliło to m.in. zastosować w jego konstrukcji materiały magnetyczne i przez to obniżyć koszty wytworzenia, a więc i zakupu. Pierwsze względnie niedrogie, lekkie, sterowane przewodowo jednorazowe samobieżne pojazdy przeciwminowe (single-shot mine disposal vehicles) wprowadziły na rynek niemiecki STN Atlas Elektronik (SeaFox) i norweski Simrad – obecnie Kongsberg Defence Systems – (Minesniper). Wkrótce dołączyły do nich: brytyjski Marconi Underwater Systems – dziś BAE Systems Maritime Services – (Archerfish) i francuski ECA Robotics (K-Ster).
Wspomniana na wstępie, zakończona niepowodzeniem, współpraca z NRD w zakresie zakupu zdalnie sterowanych pojazdów przeciwminowych przyczyniła się do rozwoju zdolności projektowania i produkcji podobnych systemów w Polsce. Krajowym liderem w tej dziedzinie jest Katedra Projektowania Okrętów i Robotyki Podwodnej Wydziału Oceanotechniki i Okrętownictwa Politechniki Gdańskiej, tworząca wraz z dwoma innymi (zajmującymi się obroną bierną i ochroną antykorozyjną okrętów oraz hydroakustyką) Centrum Morskich Technologii Militarnych (CMTM).
Pierwszym sukcesem CMTM stał się Ukwiał – system głębinowy z pojazdem zdalnie sterowanym wielokrotnego użytku, przeznaczony do transportu ładunków wybuchowych Toczek-A i B w rejon celu. Ukwiały przyjęto do eksploatacji w 1999 r. na trzech trałowcach bazowych-niszczycielach min proj. 206FM, które do dziś stanowią naszą wizytówkę w stałych zespołach przeciwminowych NATO. Użycie tych pojazdów pozwoliło zdobyć bezcenne doświadczenia, które zaowocowały kolejnymi projektami. W 1999 r., gdy zakończono proces wdrażania Ukwiała, w CMTM rozpoczęto prace nad systemem przeciwminowych samobieżnych podwodnych ładunków wybuchowych, który otrzymał – nadany przez Ministerstwo Obrony Narodowej – kryptonim Głuptak (gatunek ptaka morskiego, pojawiającego się także na naszym wybrzeżu).
Pierwsza wersja pojazdu miała konstrukcję konwencjonalną, podobną do SeaFoxa – kadłub o kształcie torpedy, cztery poziome pędniki śrubowe ruchu postępowego i jeden otunelowany pionowy do zmiany zanurzenia. Wyposażono go w: kamerę światła dziennego, dwa reflektory i sonar nawigacyjny, zaś w końcowym etapie drogi do celu był sterowany przez operatora przy konsoli na okręcie. Badania prototypu wykazały jego istotne wady, wynikające m.in. z metody celowania całym pojazdem i niedostatecznej mocy napędu. Po dotarciu w rejon wykrycia miny bezzałogowiec musiał zająć odpowiednią pozycję nad lub przed nią. Rozpatrywano bowiem zastosowanie ładunku bojowego z wkładką kumulacyjną, umieszczonego pionowo w połowie długości korpusu Głuptaka bądź poziomo, który raził minę od przodu pojazdu. Manewrowanie nim (przechylanie, pochylanie, ruch postępowy) zapewniały: mechanizm trymujący oraz różnicowe działanie pędników poziomych i działanie pionowego. Jednak system ten sprawdzał się dobrze w warunkach optymalnych – bez prądów wodnych i przy płaskim ukształtowaniu dna. Pojawianie się prądu przeciwnego uniemożliwiało manewrowanie pojazdem, powodowało napór na światłowód sterujący, skracający znacząco zasięg działania, istniało też ryzyko wkręcenia się kabla w pędniki. Nie dawało to istotnej przewagi nad systemami w rodzaju Ukwiała, stąd przyjęcie takiego założenia dla nowoczesnego systemu przeciwminowego było nieracjonalne. Ponieważ zwiększenie mocy napędu w konsekwencji doprowadziłoby do geometrycznego i finansowego rozrostu systemu, CMTM zmieniło kierunek prac, projektując docelową wersję Głuptaka – z obrotową głowicą bojową.
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu




































































































































