


Komenda Portu Wojennego w Gdyni opublikowała postępowanie na dostawę Autonomicznego Bezzałogowego Hydrograficznego Nawodnego Pojazdu Pomiarowego.
Zamówienie obejmie również szkolenie obsługi, części zamienne i eksploatacyjne, jak też oprogramowanie hydrograficzne QPS Qinsy 9 lub równoważne, do prowadzenia misji pomiarowych pojazdu ASV, zawierające elementy zapewniające wsparcie prac hydrograficznych. Zasadniczym kryterium udzielenia zamówienia jest cena.
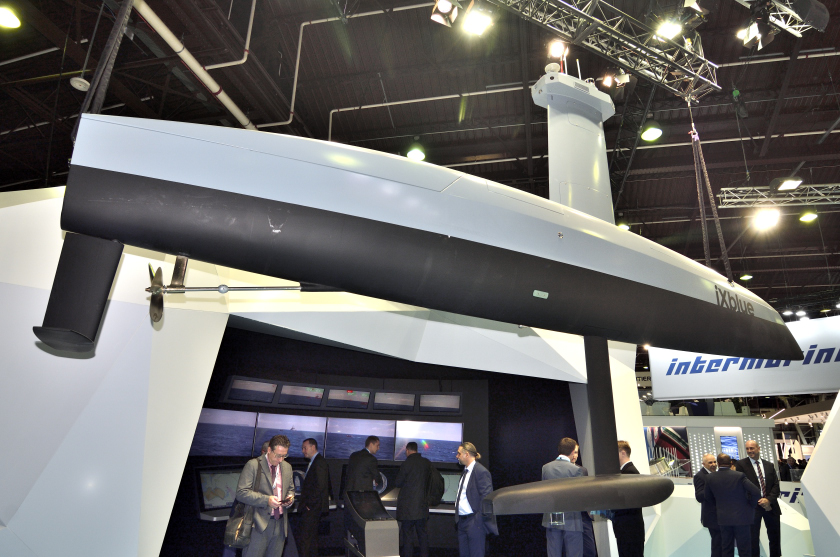
Wraz z ogłoszeniem KPW Gdynia podała opis przedmiotu zamówienia. Chodzi o autonomiczny pojazd nawodny ASV (Autonomous Surface Vehicle) na przykład DriX firmy iXblue lub równoważny. Ma on mieć długość 7-8 m, szerokość 0,6-1 m, prędkość maksymalną nie mniej niż 13 węzłów i masę ASV gotowego do misji nie więcej niż 2300 kg. Konstrukcja kadłuba powinna być kompozytowa. Zespół napędowy z silnikiem spalinowym nie powinien emitować szumu akustycznego ponad 50 dB przy prędkości 8 węzłów. Autonomiczność ma wynieść minimum 120 godziny misji pomiarowej przy prędkości misji 8 węzłów, a dokładność podążania po zaplanowanej trasie mniej niż 1m od wytyczonej trasy przy stanie morza 4.
ASV ma być wyposażony w modułowy system wymiany sensorów hydrograficznych w zależności od prowadzonej misji. Realizacja pomiarów batymetrycznych w trybie autonomicznym ma być możliwa na akwenach o głębokościach od 4 do 200 m. Ze względu na specyfikę działania pojazdu bezzałogowego, ma on być wyposażony w systemy antykolizyjny i unikania wejść na mieliznę.
ASV powinien działać w następujących trybach pracy: samodzielne podążanie po ścieżce nosiciela, samodzielne podążanie do wyznaczonego celu, samodzielne podążanie po predefiniowanej ścieżce, cyrkulacja (krążenie dookoła wyznaczonego punktu nawigacyjnego lub utrzymanie się na wyznaczonej pozycji), samodzielne autonomiczne dokowane i sterownie ręczne przez operatora pojazdu. Pojazd ma otrzymać m.in.: układ kontroli i sterowania zapewniający urządzeniu zaplanowanie misji po zadanej trasie z wykorzystaniem zabudowanego na pojeździe wyposażenia pomiarowego, system łączności szerokopasmowej do przesyłania danych hydrograficznych do stacji operatorskiej na odległość nie mniejszą niż 16 km, system łączności satelitarnej do operowania ASV poza linią horyzontu.
Wymagane wyposażenie detekcji, wizualizacji i identyfikacji: LIDAR nie mniej niż 360˚; kamera nie mniej niż fullHD 360˚; kamera podczerwieni nie mniej niż 70˚; transponder systemu identyfikacji automatycznej AIS; reflektor radarowy wzmacniający jego echo radarowe do poziomu jednoznacznie identyfikującego ASV jako jednostkę pływającą.
Wymagane minimalne wyposażenie pomiarowe pojazdu ASV: echosonda wielowiązkowa, kompensator kołysania wykonany w technologii światłowodowej (FOG), miernik prędkości dźwięku w wodzie (SVP), system pozycjonowania GNSS wykorzystujący metodę RTK, system nawigacji inercyjnej INS oparty o technologię FOG, wyposażenie pomiarowe zintegrowane w gondoli umożliwiającej szybką wymianę zestawu hydrograficznego, opuszczana gondola z wyposażeniem hydrograficznym dla lepszej stabilizacji urządzeń pomiarowych.
Termin składania ofert upływa 30 listopada tego roku.
Podobne z tej kategorii:

Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu










































































































































Bezzałogowce mają w każdym rodzaju Sił swoje miejsce. Pewnie kiedyś zastąpią całkiem ludzi.
Oprócz operatorów i serwisantów