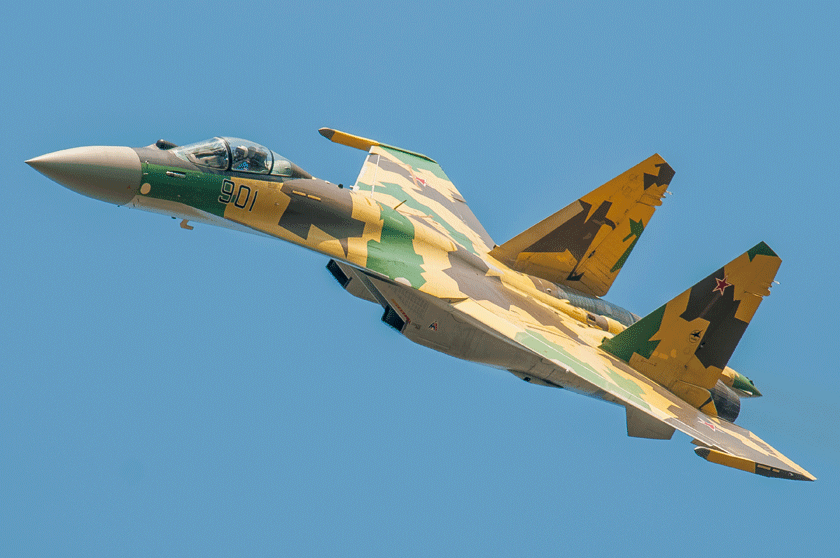
Pierwszy egzemplarz myśliwca Su-35, samolot "901", wystartował po raz pierwszy 19 lutego 2008 r. Su-35 wykorzystuje rozwiązania opracowywane równocześnie dla nowego Su-57, wdrożone w klasycznej formie Su-27.
Co pchnęło firmę Suchoj do zrobienia za własne pieniądze i bez wsparcia rządowego myśliwca Su-35? Najważniejsze było zamówienie w lipcu 2003 r. przez rosyjskie Ministerstwo Obrony myśliwca nowej generacji PAK FA, dzisiejszego Su-57. Zrodził się wtedy pomysł, aby, zanim gotowy będzie nowy Su-57, wdrożyć poszczególne robione dla niego rozwiązania w znanej i dopracowanej platformie Su-27. Projekt Su-35 został uruchomiony w tym samym roku, co Su-57; model samolotu zadebiutował na wystawie w Dubaju w grudniu 2003 r. Rozpoczęcie produkcji seryjnej Su-35 zapowiadano wtedy na 2007 r. i planowano, że stanie się on produktem zakładu Suchoja KnAAZ w Komsomolsku nad Amurem na okres przejściowy, do uruchomienia produkcji bardziej skomplikowanego Su-57 około 2015 r.

Drugi Su-35 "902", podobnie do pierwszego wykonany w konfiguracji eksportowej, podchodzi do lądowania po locie demonstracyjnym.
Dwadzieścia lat temu zakład KnAAZ produkował myśliwce Su-27 i Su-30 w odmianach znacznie mniej zaawansowanych technicznie, niż Su-30, produkowane równocześnie przez zakład korporacji Irkut w Irkucku. Jednakże irkuckie Su-30 miały jedną wadę: międzynarodowe wyposażenie z urządzeniami z Francji, Izraela i innych krajów, przez co do ChRL lub Wenezueli takiego samolotu nie można było sprzedać. Su-35 miał więc w portfelu KnAAZ zająć niszę zaawansowanego myśliwca z całkowicie rosyjskim wyposażeniem. Nota bene, ponieważ Su-35 był projektem komercyjnym, nie dostał żadnego wewnętrznego oznaczenia. Jedynym jego oznaczeniem jest po prostu Su-35 dla wyjściowej wersji eksportowej i Su-35S dla zamówionej później wersji dla rosyjskich sił powietrznych.
Wspólna dla Su-35 i późniejszego Su-57 jest architektura wyposażenia zadaniowego. Wszystkie sensory Su-35 są zintegrowane w ramach systemu celowniczo-nawigacyjnego KPrNO-35 (Kompleks Pricelno-Nawigacjonnogo Oborudowanija; KPrNO-35S w wersji dla rosyjskich Sił Powietrznych) sterowanego przez centralny system obliczeniowy IUS-35 składający się z dwóch komputerów Baget-53-31M. Za integrację systemów odpowiada biuro konstrukcyjne Suchoja, co jest nowością, ponieważ w przeszłości systemy kierowania ogniem i nawigacji lotniczej były integrowane przez firmy specjalistyczne, w przypadku myśliwców Suchoja zwykle przez RPKB z Ramienskoje. Również kabina Su-35 jest podobna do tej w Su-57. Pole informacyjne pilota tworzą dwa przylegające do siebie 15-calowe wyświetlacze ciekłokrystaliczne MFI-35 oraz szerokokątny wskaźnik na przedniej szybie IKSz-1M, wszystko produkcji RPKB. Mniejszy panel sterowania koło lewego kolana pilota podaje informacje o stanie podwieszeń, silnika i instalacji samolotu. Mały wyświetlacz z przodu, tuż pod IKSz-1M, prezentuje najważniejszą informację o celu, położeniu itp., zależnie od bieżącej sytuacji. Niewielki panel z prawej strony jest zapasowy.
Silnik Lulka AL-41F-1S (izdielije 117S) napędzający Su-35 różni się od AL-41F-1 zastosowanego w Su-57 jedynie systemem sterowania; ma maksymalny ciąg bez dopalania 86,3 kN (8800 kG), ciąg z dopalaniem 137,3 kN (14 000 kG) i ciąg nadzwyczajny 142,2 kN (14 500 kG). AL-41F-1S to gruntownie zmodernizowany silnik AL-31FP z Su-30MKI ze średnicą wentylatora zwiększoną z 905 do 932 mm. W płatowcu Su-35 zmieszczono 11 200 kg paliwa, o 20% więcej niż w Su-27. Samolot ma także pomocniczą jednostkę napędową TA14-130-35.
Na pozór, Su-35 wykorzystuje „starą” platformę Su-27, ale faktycznie została ona głęboko przerobiona. Cechą charakterystyczną wersji rozwojowych Su-27 projektowanych w latach 80. i 90. ubiegłego wieku, w tym Su-27M, irkuckich Su-30, myśliwców pokładowych Su-33 i samolotów myśliwsko-bombowych Su-34, było przednie usterzenie poziome, wprowadzone dla zbalansowania cięższego wyposażenia w przodzie kadłuba. Uruchamiając program Su-35 ponownie przemyślano jego konfigurację aerodynamiczną. Okazało się, że dzięki przeprojektowaniu wnętrza samolotu, użyciu nowych materiałów oraz nowego wyposażenia o mniejszej masie, nie ma potrzeby balansowania samolotu przed usterzenie przednie. Przednie usterzenie okazało się także niepotrzebne do poprawy własności manewrowych myśliwca. Funkcję tę przejęły ruchome dysze silników; odchylony wektor ciągu silnika generuje dodatkową cyrkulację powietrza wokół skrzydła, znacznie zwiększając siłę nośną przy dużych kątach natarcia. Zniknęły więc wszystkie zalety przedniego usterzenia poziomego, a pozostały tylko jego wady – dodatkowa masa i opór. W ten sposób, po latach, Su-35 powrócił do konfiguracji klasycznego Su-27.
Zewnętrznych różnic między Su-35 i Su-27 jest niewiele. Stateczniki pionowe są niższe, ale stery kierunku są szersze; „żądło” ogonowe stało się krótsze. Usunięto duży hamulec aerodynamiczny na grzbiecie kadłuba; zamiast tego hamowanie aerodynamiczne odbywa się poprzez różnicowe wychylenie sterów kierunku. Całkowicie nowy jest poczwórnie powtórzony cyfrowy system sterowania lotem KSU-35, bardzo podobny do systemu KSU-50 w Su-57.
To, że Su-35 jest najbardziej zaawansowanym myśliwcem w służbie w Rosji zawdzięcza on przede wszystkim nowym sensorom celowniczym i uzbrojeniu. System radiolokacyjny Sz135 Irbis (na eksport Irbis-E) instytutu NIIP im. Tichomirowa składa się z radaru N135, systemu walki elektronicznej Chibiny-M oraz systemu identyfikacji „swój-obcy” 4283MP (aparatura zapytująca mieści się w krawędziach natarcia skrzydła). Radar N135 jest rozwinięciem radiolokatora N011M Bars z Su-30MKI/SM i również ma antenę z pasywnym skanowaniem elektronicznym. Sterowany jest przed dwa komputery Solo-35.01 (wstępne przetwarzanie sygnału) i Solo-35.02 (przetwarzanie danych i sterowanie radarem). Zalety Irbisa w porównaniu do Barsa to szerszy zakres częstotliwości roboczych, większe kąty skanowania, po 125° na boki (dzięki ulepszonej antenie i dwustopniowemu zawieszeniu), zwiększony zasięg i lepsza odporność na zakłócenia, a także większa rozdzielczość. Irbis jest zdolny do śledzenia podczas skanowania do 30 celów powietrznych, z których osiem może być śledzonych w sposób quasi-ciągły z dokładnością wystarczającą do jednoczesnego użycia pocisków „powietrze-powietrze” z aktywnym naprowadzaniem radiolokacyjnym. Dwa cele mogą być jednocześnie ostrzelane za pomocą pocisków z półaktywnym naprowadzaniem radiolokacyjnym (wymagającym podświetlenia celu). W trybie „powietrze-ziemia” Irbis jest w stanie jednocześnie naprowadzać pociski na cztery cele.
Radar ma rozdzielczość wystarczającą dla określenia liczby celów w grupie: z odległości 50 km rozróżnia cele znajdujące się 50-100 m od siebie w odległości, 2,5° we współrzędnych kątowych lub 5 m/s w prędkości. Ciekawą cechą radaru jest tzw. tryb wykrywania dalekiego zasięgu, w którym używana jest moc 20 kW (standardowa moc to 5 kW) ograniczona do wąskiego sektora; Irbis może w tym trybie wykryć cel wielkości samolotu myśliwskiego z odległości 350 km na kursach spotkaniowych lub 150 km w pościgu. Zasięgi w normalnym trybie poszukiwania są dwukrotnie mniejsze.
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu

































































































































