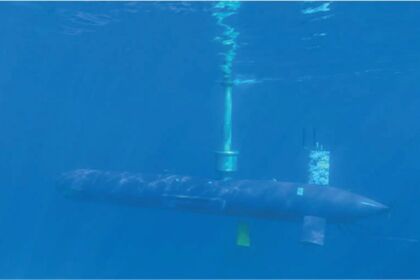
2 grudnia Niemiecka Marynarka Wojenna (Deutsche Marine) oficjalnie zakończyła, realizowane na wodach Morza Bałtyckiego, próby izraelskiego bezzałogowego autonomicznego pojazdu podwodnego IAI Elta ELI-3325 BlueWhale klasy XLUUV (Extra Large Uncrewed Undersea Vehicle).
Deutsche Marine testy te rozpoczęła pod koniec października. Prowadzone były wspólnie z krajowym koncernem Atlas Elektronik, a także z Federalnym Biurem ds. Wyposażenia, Technologii Informacyjnych i Wsparcia Federalnych Sił Zbrojnych (BAAINBw, Bundesamt für Ausrüstung, Informationstechnik und Nutzung der Bundeswehr), zgodnie z przepisami obowiązującymi zarówno w Marynarce Wojennej, jak i w Urzędzie Technicznym Okrętów i Uzbrojenia Morskiego, Technologii i Badań WTD 71 (Wehrtechnische Dienststelle für Schiffe und Marinewaffen, Maritime Technologie und Forschung).
Jedną z ważniejszych kwestii, jakie były sprawdzane, dotyczyły przydatności bezzałogowych pojazdów tej klasy i wielkości do realizacji szeroko pojętych zadań wywiadowczych, wykrywania i wskazywania celów tak nawodnych, jak i podwodnych oraz - co jest obecnie bardzo popularne - czy zasadne jest wykorzystanie ich do dozoru infrastruktury krytycznej. Zadania te postawione zostały niejako pod kątem przygotowania do realizacji niezwykle ambitnego programu modernizacji Deutsche Marine dotyczącego m.in. pozyskania pojazdów bezzałogowych (Der Kurs für die Marine ab 2035).
Strona niemiecka swoje zainteresowanie izraelskim pojazdem wyraziła już 10 maja 2023 roku w trakcie konferencji i salonu Undersea Defence Technology (UDT) w Rostocku. Wówczas bowiem należąca do holdingu thyssenkrupp Marine Systems (tkMS) firma Atlas Elektronik oficjalnie rozpoczęła współpracę z izraelskim koncernem IAI Elta. Jednym z najważniejszych celów tej współpracy było doposażenie pojazdu BlueWhale w zaawansowany holowany, pasywny system hydrolokacyjny. Pracujący w zakresie częstotliwości od 50 do 10 000 Hz, kanał pasywny został zapożyczony ze sprawdzonego w różnych warunkach systemu ACTAS (Active Towed Array Sonar).
Warto w tym miejscu wspomnieć, że izraelski bezzałogowiec mimo ujawnienia dopiero 5 maja 2023 roku, jest już dopracowaną konstrukcją. Izrael testował go bowiem w głębokiej tajemnicy przez wiele miesięcy (sam producent podkreśla bowiem, że w dniu ujawnienia miał on za sobą już tysiące godzin operacji i testów), został także wykorzystany w co najmniej jednych międzynarodowych manewrach. Powstał on najprawdopodobniej jako modyfikacja zaprezentowanego w 2017 roku, i zaprojektowanego specjalnie na zamówienie Sił Obronnych Izraela, bezzałogowego pojazdu Caesaron. Legitymuje się on masą 5,5 tony przy wymiarach 10,9x1,12 m. W położeniu podwodnym może on przemieszczać się z prędkością do 7 węzłów. Optymalna prędkość patrolowa, przy której długotrwałość rejsu wynosić może nawet 30 dni, ograniczona jest natomiast do 2-3 węzłów. Maksymalna, oficjalnie ujawniona, głębokość operacyjna wynosi 300 m. Kształt pojazdu oraz rozmieszczenie sterów głębokości zostało tak dobrane, by AUV mógł kłaść się na dnie. Jego wielkość z kolei dobrana została do transportu wewnątrz 40-stopowego kontenera. Jak przystało na nowoczesną platformę jest on konstrukcją modułową i może zostać doposażony w specjalistyczne wyposażenie w zależności od potrzeb. Jego zakres działalności dotyczyć może m.in. zadań klasyfikowanych jako ISR (Intelligence, Surveillance & Reconnaissance), do przeprowadzenia zwiadu w rejonie, gdzie planowany jest desant operatorów wojsk specjalnych, zabezpieczenia działań własnych okrętów podwodnych, poruszając się z odpowiednim wyprzedzeniem lub, co obecnie jest szczególnie pożądane, umożliwi dozór podwodnej (i nawodnej) infrastruktury krytycznej. Wyposażony jest w system radiolokacyjny o małym prawdopodobieństwie wykrycia (LPI) oraz system optoelektroniczny (niezbędny dla zadań typu IMINT). Może być także dodatkowo wyposażony w systemy walki elektronicznej (ELINT i COMINT). Wszystkie anteny tego typu instalowane są na podnoszonym teleskopowo maszcie. Oczywiście ELI-3325 wyposażony jest także w systemy hydrolokacyjne tj. dwa sonary obserwacji bocznej (z antenami o syntetycznej aperturze), które umożliwiają mapowanie dna oraz wykrywanie i precyzyjne lokalizowanie obiektów niebezpiecznych, w tym min dennych, a także sonar dziobowy oraz sonar przeznaczony do wykrywania i omijania przeszkód (patrzący pod kątem ok 45° w dół). Wszystkie dane pozyskane przez operujący w rejonie pojazd przesyłane są do centrum dowodzenia przez szyfrowane, szerokopasmowe połączenie satelitarne w czasie rzeczywistym.
Podobne z tej kategorii:

Pełna wersja artykułu
Pełna wersja artykułu
Pełna wersja artykułu